一、什么叫人脸识别技术
人脸识别工程化应用研究 在20世纪60年代正式开启。初期的方法主要利用了人脸的几何结构,通过分析人脸器官特征点及其之间的拓扑关系进行辨识。这种方法简单直观,但是一旦人脸姿态、表情发生变化,则精度严重下降。如今的解决方案多是基于主动近红外图像的多光源人脸识别技术。它可以克服光线变化的影响,已经取得了卓越的识别性能,在精度、稳定性和速度方面的整体系统性能超过三维图像人脸识别。
二、.人脸识别技术原理:一是建立一个包含大批量人脸图像的数据库;二是通过各种方式来获得当前要进行识别的目标人脸图像;三是将目标人脸图像与数据库中既有的人脸图像进行比对和筛选。
三、人脸识别技术流程:
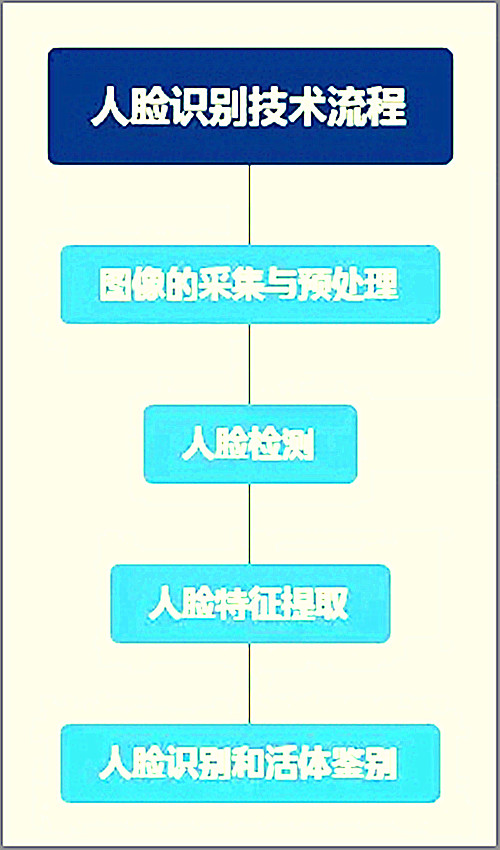
(1)图像的采集与预处理:人脸图像的采集一般分为两种途径,有人脸图像的批量导入和人脸图像的实时采集;预处理的目的是在系统对人脸图像的检测基础之上,对人脸图像做出进一步的处理以利于人脸图像的特征提取。
(2)人脸检测:人脸检测方法可分为三类,分别是基于肤色模型的检测、基于边缘特征的检测、基于统计理论方法。
(3)人脸特征提取:目前主流的人脸识别系统可支持使用的特征通常可分为人脸视觉特征、人脸图像像素统计特征等,而人脸图像的特征提取就是针对人脸上的一些具体特征来提取的。
(4)人脸识别和活体鉴别:
实际的人脸识别系统一般需要增加活体鉴别环节,因为生物特征识别的共同问题之一就是要区别该信号是否来自于真正的生物体,这种信号包括要求人左右转头,眨眼睛,开开口说句话等。
市场上应用最多的是三种方案,包括3D结构光方案、ToF 3D方案和双目立体成像方案。
1.3D结构光技术:3D结构光技术(Structured Light)是通过光学手段获取被拍摄物体的三维结构,再将获取到的信息进行更深入的应用。这种方案在未来将很有前景,可拓展空间更加广阔,比如5G通信、AR以及其他与3D建模等相关的领域都可以发挥它独有的关键作用。例如,iphone x/xr/xs/xsmax、oppo Find x、mate20pro等都是采用了3D结果光技术原理。
3D 结构光也有它的局限,相比传统的摄像头,3D 结构光可以工作的距离要短一些,最长距离一般在 1 米左右,OPPO给出的数据是60cm远精度也能控制在±1mm范围。
2.ToF;ToF(Time Of Flight,时差测距技术),简单来说,是指发出一道经过处理的光,碰到物体以后会反射回来,捕捉来回的时间,因为已知光速和调制光的波长,所以能快速准确计算出到物体的距离。ToF技术的普及与发展指日可待,vivo已经抢占先机,而且苹果分析师也曾预测2019年iPhone也许会有重大创新就包括采用ToF技术。
3.双目立体成像:双目立体成像(Stereo System)是利用双摄像头拍摄物体,再通过三角形原理计算物体距离。已经上市的华为nova3采用的就是双目3D人脸识别方案。
双目方案的原理最简单,成本也比较低。
四、技术发展方向
(1)结合三维信息:二维和三维信息融合使特征更加鲁棒多特征融合
(2)多特征融合:单一特征难以应对复杂的光照和姿态变化
(3)大规模人脸比对:面向海量数据的人脸比对与搜索
人脸识别工程化应用研究 在20世纪60年代正式开启。初期的方法主要利用了人脸的几何结构,通过分析人脸器官特征点及其之间的拓扑关系进行辨识。这种方法简单直观,但是一旦人脸姿态、表情发生变化,则精度严重下降。如今的解决方案多是基于主动近红外图像的多光源人脸识别技术。它可以克服光线变化的影响,已经取得了卓越的识别性能,在精度、稳定性和速度方面的整体系统性能超过三维图像人脸识别。
二、.人脸识别技术原理:一是建立一个包含大批量人脸图像的数据库;二是通过各种方式来获得当前要进行识别的目标人脸图像;三是将目标人脸图像与数据库中既有的人脸图像进行比对和筛选。
三、人脸识别技术流程:
(1)图像的采集与预处理:人脸图像的采集一般分为两种途径,有人脸图像的批量导入和人脸图像的实时采集;预处理的目的是在系统对人脸图像的检测基础之上,对人脸图像做出进一步的处理以利于人脸图像的特征提取。
(2)人脸检测:人脸检测方法可分为三类,分别是基于肤色模型的检测、基于边缘特征的检测、基于统计理论方法。
(3)人脸特征提取:目前主流的人脸识别系统可支持使用的特征通常可分为人脸视觉特征、人脸图像像素统计特征等,而人脸图像的特征提取就是针对人脸上的一些具体特征来提取的。
(4)人脸识别和活体鉴别:
实际的人脸识别系统一般需要增加活体鉴别环节,因为生物特征识别的共同问题之一就是要区别该信号是否来自于真正的生物体,这种信号包括要求人左右转头,眨眼睛,开开口说句话等。
市场上应用最多的是三种方案,包括3D结构光方案、ToF 3D方案和双目立体成像方案。
1.3D结构光技术:3D结构光技术(Structured Light)是通过光学手段获取被拍摄物体的三维结构,再将获取到的信息进行更深入的应用。这种方案在未来将很有前景,可拓展空间更加广阔,比如5G通信、AR以及其他与3D建模等相关的领域都可以发挥它独有的关键作用。例如,iphone x/xr/xs/xsmax、oppo Find x、mate20pro等都是采用了3D结果光技术原理。
3D 结构光也有它的局限,相比传统的摄像头,3D 结构光可以工作的距离要短一些,最长距离一般在 1 米左右,OPPO给出的数据是60cm远精度也能控制在±1mm范围。
2.ToF;ToF(Time Of Flight,时差测距技术),简单来说,是指发出一道经过处理的光,碰到物体以后会反射回来,捕捉来回的时间,因为已知光速和调制光的波长,所以能快速准确计算出到物体的距离。ToF技术的普及与发展指日可待,vivo已经抢占先机,而且苹果分析师也曾预测2019年iPhone也许会有重大创新就包括采用ToF技术。
3.双目立体成像:双目立体成像(Stereo System)是利用双摄像头拍摄物体,再通过三角形原理计算物体距离。已经上市的华为nova3采用的就是双目3D人脸识别方案。
双目方案的原理最简单,成本也比较低。
四、技术发展方向
(1)结合三维信息:二维和三维信息融合使特征更加鲁棒多特征融合
(2)多特征融合:单一特征难以应对复杂的光照和姿态变化
(3)大规模人脸比对:面向海量数据的人脸比对与搜索
